步进电动机的结构和步进电动机的工作原理:
步进电机是一种将电脉冲信号转换为角位移或线性位移的开环控制元件或闭环控制元件。在无过载的情况下,电动机的速度和停止位置仅取决于控制脉冲信号的频率和脉冲数。
2.步进电机的脉冲越多,电机旋转角度越大。
3.脉冲频率越高,电动机速度越快,但是不能超过最高频率,否则电动机的转矩将迅速降低,并且步进电动机将不会旋转。
步进电机分类:
1.根据转矩产生原理,步进电动机可分为无功步进电动机和励磁步进电动机。 (无功:转子无绕组,励磁定子绕组产生无功转矩,实现步进电机的运行。励磁:定子和转子有励磁绕组,电磁转矩用于实现电机的运行。步进电机。)
2.步进电机根据输出转矩可分为伺服步进电机和动力步进电机。 (伺服类型:输出扭矩仅为NM的百分之几至十分之几。它只能驱动较小的负载。必须将其与液压扭矩放大器一起使用以驱动较大的负载,例如机床工作台。功率类型:输出扭矩为5 -50N.M或更高,可以直接驱动较大的负载,例如机床工作台。)
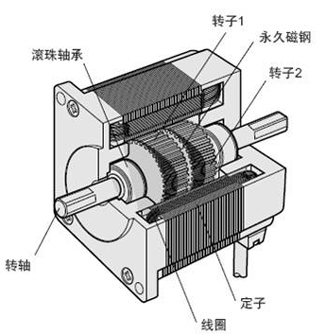
3.步进电动机可分为:(1)单定子型; (2)双定子型; (3)三定子型; (4)多定子类型根据定子数量而定。
4.步进电动机可根据各相的绕组分布分为径向分布和轴向分布。 (径向分布:根据周长顺序排列电动机的相位。轴向分布:根据轴依次排列电动机的相位。)
1.普通步进电机的精度为步进角的3-5%,并且不是累积的。因此,步进电机可用作控制专用电机,广泛用于各种开环控制中。
2.步进电动机的最高允许温度与电动机的退磁点有关:步进电动机的温度过高会首先使电动机的磁性材料退磁,从而导致转矩降低甚至失磁。步。磁性材料的退磁点;一般来说,磁性材料的退磁点在130摄氏度以上,有的甚至高达200摄氏度,因此步进电机的出现温度在80-90摄氏度是完全正常的。
3.步进电机的转矩将随着速度的增加而减小。当步进电动机旋转时,电动机各相绕组的电感将形成反电动势;频率越高,反电动势越大。在其作用下,电动机的相电流随着频率(或速度)的增加而减小,从而导致转矩减小。
4.步进电机可以在低速下正常运行,但是如果高于一定速度,则无法启动,并伴有啸叫声。步进电机具有一个技术参数:空载启动频率,即步进电机的脉冲频率可以在空载条件下正常启动。如果脉冲频率高于该值,则电动机将无法正常启动,并且可能会出现失步或失速。在负载下,启动频率应更低。如果希望电动机实现高速旋转,则脉冲频率应该有一个加速过程,即启动频率很低,然后根据一定的加速度增加到所需的高频(电动机速度从低速开始增加)。